Ρομπότ-κολυμβητές θα αναζητήσουν εξωγήινη ζωή στο ηλιακό μας σύστημα
Η πρωτοποριακή ιδέα έχει λάβει ήδη χρηματοδότηση από τη NASA
O Ethan Schaler, μηχανικός ρομποτικής στο Jet Propulsion Laboratory (JPL) της NASA, έχει οραματιστεί το SWIM (Sensing With Independent Micro-swimmers), ένα πρόγραμμα που μπορεί να συνεισφέρει στην αναζήτηση ιχνών εξωγήινης ζωής. Σύμφωνα με το πρόγραμμα αυτό, ένα σμήνος που απαρτίζεται από μικρά ρομπότ μεγέθους κινητού τηλεφώνου, θα εσωκλείεται σε ένα άλλο, «μητρικό» ρομπότ, το οποίο θα τρυπά των πάγο της επιφάνειας φεγγαριών του ηλιακού μας συστήματος όπως η Ευρώπη ή ο Εγκέλαδος, που κρύβουν ωκεανούς κάτω από τις επιφάνειές τους. Έπειτα θα απελευθερώνει την ομάδα των ρομπότ-κολυμβητών για να εξερευνήσουν το περιβάλλον.
Η Ευρώπη, το τέταρτο μεγαλύτερο φεγγάρι του Δία, υπολογίζεται ότι διαθέτει ένα ωκεανό 60 – 150 χιλιόμετρα σε βάθος, που βρίσκεται κάτω από ένα στρώμα πάγου πάχους 15 – 25 χιλιομέτρων. Αυτό σημαίνει πως, παρόλο που η διάμετρος του δορυφόρου είναι το ένα τέταρτο σε σχέση με αυτή της Γης, η Ευρώπη ίσως περιέχει ποσότητα νερού διπλάσια από όλους τους ωκεανούς του πλανήτη μας.
Ο Εγκέλαδος, το έκτο μεγαλύτερο φεγγάρι του Κρόνου, φαίνεται πως κρύβει έναν ωκεανό βάθους 26 – 31 χιλιομέτρων κάτω από ένα στρώμα πάγου μέσου πάχους 20 – 25 χιλιομέτρων. Ωστόσο, το πάχος του πάγου είναι μικρότερο των 5 χιλιομέτρων στο νότιο πόλο του δορυφόρου. Παράλληλα, υπάρχουν ενδείξεις ύπαρξης υδροθερμικών αγωγών στο εσωτερικό του.
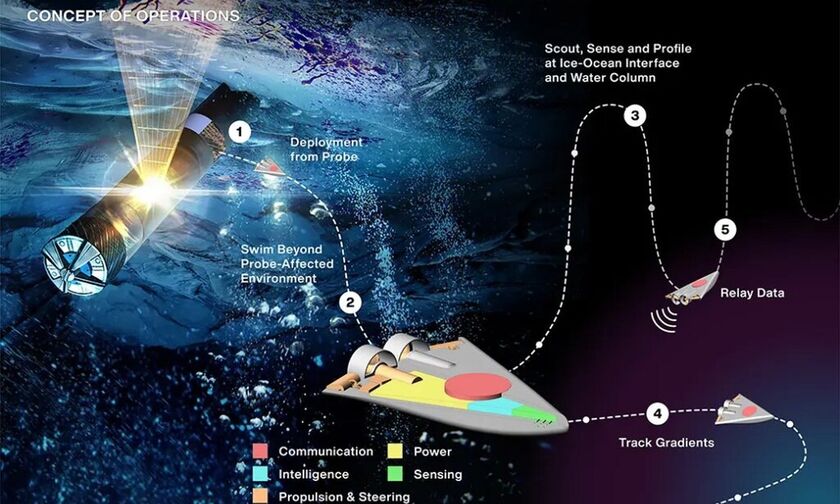
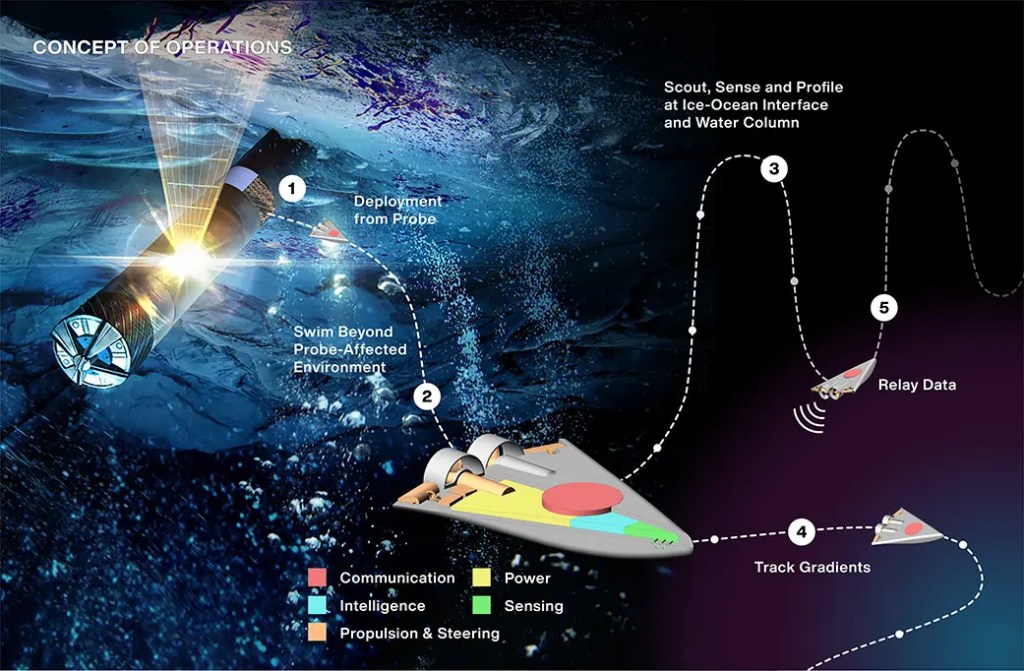
Το μητρικό ρομπότ, ή «cryobot», θα τρυπά την παγωμένη επιφάνεια του ουράνιου σώματος που εξερευνά, λιώνοντας τον πάγο με τη βοήθεια μιας θερμής πυρηνικής μπαταρίας, και θα εισέρχεται στον υπόγειο ωκεανό. Θα χρησιμοποιεί έναν σύνδεσμο επικοινωνίας – καλώδιο, μέσω του οποίου θα συνδέεται με το όχημα προσεδάφισης (lander) της επιφάνειας, το οποίο με τη σειρά του θα είναι ο δίαυλος επικοινωνίας με τη Γη. Με βάση αυτόν τον σχεδιασμό, τo μητρικό ρομπότ δεν θα μπορεί να κινηθεί πολύ μακριά από το διαχωριστικό σημείο πάγου – ωκεανού. Έτσι, θα αναλαμβάνουν δράση τα ρομπότ-κολυμβητές, τα οποία θα πραγματοποιούν εξερεύνηση του υδάτινου περιβάλλοντος. Ακόμα και αν το μέρος όπου διείσδυσε το cryobot κριθεί ακατάλληλο, η ελευθερία κινήσεων του σμήνους SWIM καθιστά πιθανή την απόδοση αποτελεσμάτων. Ο Samuel Howell του JPL, μέλος της ομάδας του SWIM, παρομοίωσε το concept με αυτό του μικρού ελικοπτέρου Ingenuity, που συνοδεύει το ρόβερ «Perseverance» στην αποστολή του, εξερευνώντας το περιβάλλον του Άρη. Σε αυτή την περίπτωση ωστόσο, οι εξερευνητές του εξωγήινου περιβάλλοντος θα είναι πολλoί.

Εικόνα : NASA/JPL-Caltech
Τα ρομπότ-κολυμβητές, σύμφωνα με το σχέδιο, θα έχουν σφηνοειδές σχήμα και μήκος περί τα 12,7 εκατοστά (5 ίντσες), ενώ ο όγκος τους θα είναι περί τα 50 με 80 κυβικά εκατοστά (3 με 5 κυβικές ίντσες). Δεδομένων των μικρών τους διαστάσεων, δεκάδες από αυτά θα μπορούσαν να φιλοξενηθούν σε ένα τμήμα μήκους 10 εκατοστών (4 ιντσών) και διαμέτρου 25 εκατοστών (10 ιντσών) ενός cryobot, κάτι το οποίο μεταφράζεται σε 15% του συνολικού όγκου του επιστημονικού φορτίου. Επομένως, θα μπορούσαν να συμπεριληφθούν στην αποστολή στάσιμα όργανα για τη λήψη σχετικών μετρήσεων.
Κάθε μονάδα του SWIM θα περιλαμβάνει σύστημα προώθησης, υπολογιστή και σύστημα επικοινωνίας με υπερήχους. Ακόμα, θα περιλαμβάνονται αισθητήρες θερμοκρασίας, αλατότητας, οξύτητας και πίεσης. Τέλος, η επόμενη φάση υλοποίησης του προγράμματος (Phase 2 study) θα περιλαμβάνει και την μελέτη ενσωμάτωσης αισθητήρων σχετικών με την ανίχνευση ζωής.
Εικόνα : NASA JPL / Ethan Schaler
Ένα σμήνος από μικρά ρομπότ-κολυμβητές, δύναται να εξερευνήσει μεγάλο όγκο νερού, ενώ παράλληλα οι πολλαπλές μετρήσεις στο ίδιο σημείο όταν το σμήνος συγκεντρώνεται, θα βελτιώνουν την ακρίβεια των δεδομένων. Επιπλέον, οι μετρήσεις των ρομπότ-κολυμβητών θα μπορούσαν να αποτυπώσουν την κλίση, ή αλλιώς τη σταδιακή μεταβολή, ποσοτήτων όπως η θερμοκρασία και η αλατότητα, δίνοντας έτσι τη δυνατότητα του εντοπισμού της πηγής ενός σήματος που έχει ανιχνευθεί. Ένα ακόμα προτέρημα των μικρών ρομπότ, είναι η δυνατότητα λήψης μετρήσεων ανεξάρτητων από την επίδραση της εξαιρετικά θερμής πυρηνικής μπαταρίας που θα χρησιμοποιήσει το cryobot για να διεισδύσει στον υπόγειο ωκεανό κάποιου παγωμένου φεγγαριού.
To σχέδιο του Ethan Schaler είχε λάβει αρχικά χρηματοδότηση 125.000 δολαρίων από τη NASA για την πρώτη φάση της μελέτης, ενώ πρόσφατα έλαβε επιπρόσθετη χρηματοδότηση 600.000 δολαρίων για τη δεύτερη φάση, η οποία θα επιτρέψει στους ερευνητές του SWIΜ να δημιουργήσουν και να δοκιμάσουν τα πρώτα 3D μοντέλα των ρομπότ, μέσα στα επόμενα δύο χρόνια.
Πηγή: astronio.gr
